


ピエゾアシストモータ
ピエゾアシストモータ
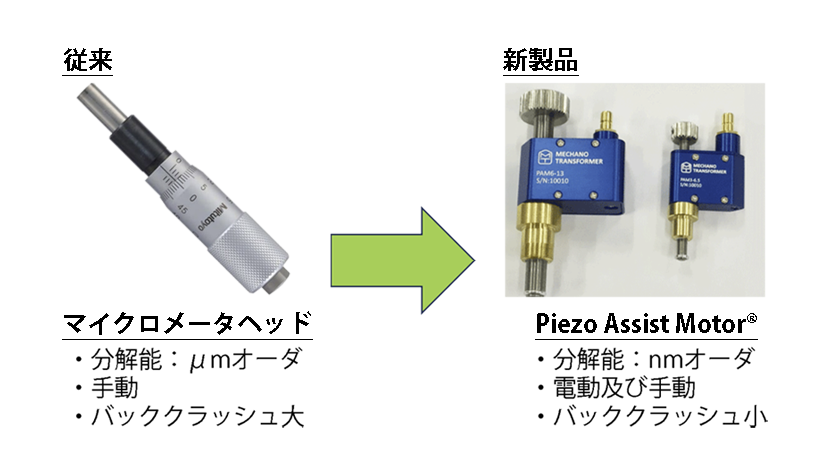
- ピエゾアシストモータとは大変位(ロングストローク)かつ高分解能、高推力を出力できるモータです。
- PAM3-6.5及びPAM6-13の出力推力はそれぞれ13N及び29Nです。一方、PAM3-6.5及びPAM6-13の変位量はそれぞれ6.5㎜と13㎜で,分解能はそれぞれ30nm及び25nm以下です。
- 名刺サイズ以下で小型であるため、簡単に持ち運びすることができ、使用方法もとても簡単。
- 科学研究及び工業用途のために、設計されたモータであり、下記の用途に適しています。
- 顕微鏡のスキャニング
- 高速スループット顕微鏡
- 高分解能顕微鏡
- マイクロマニピュレーション
- バイオテクノロジー
- 干渉計形状測定
- マスク/ウエハー位置決め
- 計測技術
- ミラーホルダー角度調整
- 駆動するには、専用のコントローラ(PAMC-104)および専用ソフトをご使用ください。また、専用ケーブル(2m)を付属されています。
*「ピエゾアシスト」、「Piezo Assist」および「PiezoAssist」は有限会社メカノトランスフォーマの登録商標です。
駆動例(参考)
※ 駆動をわかりやすくするため、超高速で再生しています。

PAM3-6.5 (荷重1.5kg 約100倍速)
PAM6-13 (荷重3kg 約1,000倍速)
- 顕微鏡のスキャニング
- 高速スループット顕微鏡
- 高分解能顕微鏡
- マイクロマニピュレーション
- バイオテクノロジー
- 干渉計形状測定
- マスク/ウエハー位置決め<
- 計測技術
- ミラーホルダー角度調整
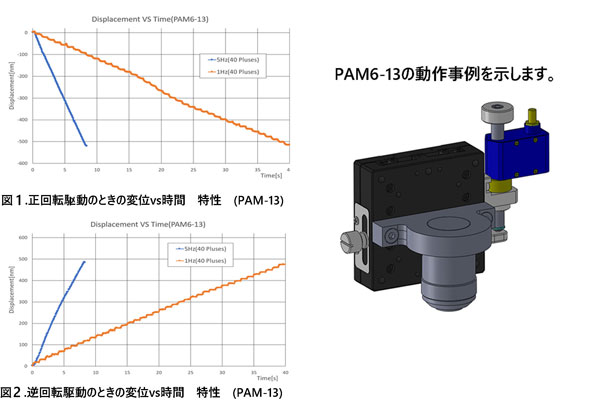
- 1Hzでは、10~16nm/pulseの階段状変位になり、5Hzでは滑らかに変位しています。
- 40パルスに対する変位量は、1Hz 5Hzともに、正回転では 480nm(平均 12nm/pulse、逆回転では 520nm(平均 13nm/pulse)になっています。
- ナノメートル単位の超精細な分解能
- 電源無供給でも位置を保持
- 可動角度範囲は±3.5°(≒ ± 61mrad )
- 1.6 μrad ずつ超精細に調整可能(7万段階以上)
- ピエゾアクチュエータは自分自分の絶対位置は分からないため。
- 動作中にはピエゾアシストモータには高電圧がかかるため、モータに触らないでください。
- ピエゾアシストモータを分解しないでください
- 可燃物の近くや湿気の多い場所でピエゾアシストモータを使用しないでください。
- コントローラやピエゾアシストモータに衝撃を与えたりした後で、コントローラやピエゾアシストモータを通電しないでください。
- 動作中、ピエゾアシストモータからは高いピッチの音がします。
- 分解能が30ナノメートル以下まで高まる
- 位置決め後、電源供給なしで位置を保持できる
- 精密ステージを簡単に電動化・自動化できる
- 電動駆動による自動化を簡単に実現
- 30ナノメートル以下の位置決めを簡単に実現
- 無電源供給でも、調整した位置を保持
- マイクロメータヘッドと簡単に置き換え可能
- 外部センサーを付けることで、移動量を簡単に可視化
| 品名 | 先端形状 | 価格 [円] (税込) |
|---|---|---|
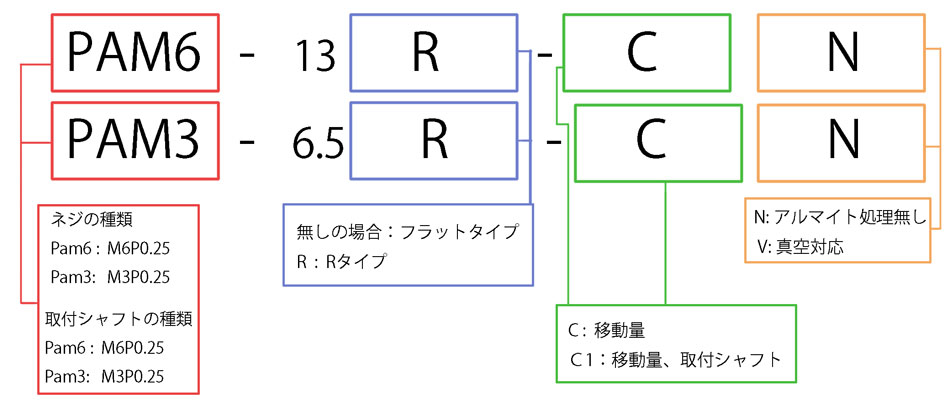
| PAM3-6.5 | フラットタイプ , 3mm, 最小移動量 30nm, 取り付け部 φ6シャンク | 88,000 |
| PAM6-13 | Rタイプ, 6.5mm, 最小移動量 25nm, 取り付け部 φ9.5シャンク | 77,000 |
| PAMC-104 | ピエゾアシストモータコントローラ, 4軸, RS232C通信 | 132,000 |
| PAM-RC100 | ピエゾアシストモータコントローラ (リモコン) | 55,000 |
| PAMC4-485 | ピエゾアシストモータコントローラ, 4軸, RS485通信 | 132,000 |
| 先端形状 | 移動量 | 取付シャフト径 | アルマイト処理 | 駆動ドライバー | 図面 (PDF) | 図面 (.setp) | |
|---|---|---|---|---|---|---|---|
| PAM6-13 | フラットタイプ | ±6.5mm | φ9.5 (M9.5 x 0.5) | 有り | PAMC-104/ 485 | A111 | link |
| PAM6-13R | Rタイプ | ±6.5mm | φ9.5 (M9.5 x 0.5) | 有り | PAMC-104/ 485 | A112 | link |
| PAM6-13R-C | Rタイプ | ±3mm | φ9.5 (M9.5 x 0.5) | 有り | PAMC-104/ 485 | A110 | link |
| PAM6-13R-C1 | Rタイプ | ±4mm | φ9.5 | 有り | PAMC-104/ 485 | A113 | link |
| 先端形状 | 移動量 | 取付シャフト径 | アルマイト処理 | 駆動ドライバー | 図面 (PDF) | 図面 (.setp) | |
|---|---|---|---|---|---|---|---|
| PAM6-13N | フラットタイプ | ±6.5mm | φ9.5 (M9.5 x 0.5) | 無し | PAMC-104/ 485 | A111 | link |
| PAM6-13RN | Rタイプ | ±6.5mm | φ9.5 (M9.5 x 0.5) | 無し | PAMC-104/ 485 | A112 | link |
| PAM6-13R-CN | Rタイプ | ±3mm | φ9.5 (M9.5 x 0.5) | 無し | PAMC-104/ 485 | A110 | link |
| PAM6-13R-C1 | Rタイプ | ±4mm | φ9.5 | 無し | PAMC-104/ 485 | A113 | link |
| 先端形状 | 移動量 | 取付シャフト径 | アルマイト処理 | 駆動ドライバー | 図面 (PDF) | 図面 (.setp) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PAM3-6.5 | フラットタイプ | ±3mm | φ6 | 有り | PAMC-104/ 485 | A105 | link | |||||||
| PAM3-6.5R | Rタイプ | ±3mm | φ6 | 有り | PAMC-104/ 485 | A104 | link | |||||||
| PAM3-6.5R-C1 | Rタイプ | ±(3mm±0.2) | φ5 | 有り | PAMC-104/ 485 | A106 | link |
| 先端形状 | 移動量 | 取付シャフト径 | アルマイト処理 | 駆動ドライバー | 図面 (PDF) | 図面 (.setp) | |
|---|---|---|---|---|---|---|---|
| PAM3-6.5N | フラットタイプ | ±3mm | φ6 | 無し | PAMC-104/ 485 | A105 | link |
| PAM3-6.5RN | Rタイプ | ±3mm | φ6 | 無し | PAMC-104/ 485 | A104 | link |
| PAM3-6.5R-C1N | Rタイプ | ±(3mm±0.2) | φ5 | 無し | PAMC-104/ 485 | A106 | link |
# PAMの型番決め方
ピエゾアシストモータの動作原理
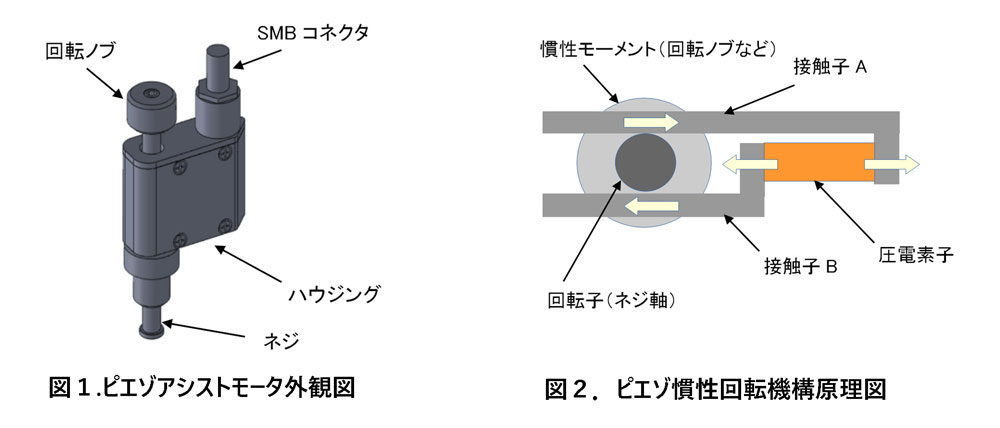
ピエゾアシストモータは、ハウジング内のピエゾ慣性回転機構によりネジ軸を回転し、ネジ軸方向に推力と変位を発生します。
図2のピエゾ慣性回転機構原理図に於いて、回転子はネジ軸と一体で慣性モーメント(回転ノブなど)に接続されており、回転子と 接触子間には所要の静摩擦力を持たせる様に圧力(非表示)が印加されています。図2のように圧電素子が伸びると、接触子A,Bは図2 のように相対動作します。この接触子A,Bの相対動作の加速度によって慣性モーメントに生じる回転運動の加速度による発生力が、回転子 と接触子間の静摩擦力以下である場合には、回転子は回転運動を起こし、静摩擦力以上である場合には、回転子と接触子間にはすべりを生じます。
PiezoAssistMotor宣伝資料カタログ >> Link
仕様
| 品名 | PAM6-13 | PAM6-13R | PAM6-13R-C | PAM6-13R-C1 | PAM6-13N | PAM6-13RN | PAM6-13R-CN | PAM6-13R-C1N | PAM3-6.5 | PAM3-6.5R | PAM3-6.5R-C1 | PAM3-6.5N | PAM3-6.5RN | PAM3-6.5R-C1N |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最小移動量 (nm) | 25以下 | 25以下 | 25以下 | 25以下 | 25以下 | 25以下 | 25以下 | 25以下 | 30以下 | 30以下 | 30以下 | 30以下 | 30以下 | 30以下 |
| 最大耐荷重(N) | 29.4以上 | 29.4以上 | 29.4以上 | 29.4以上 | 29.4以上 | 29.4以上 | 29.4以上 | 29.4以上 | 13以上 | 13以上 | 13以上 | 13以上 | 13以上 | 13以上 |
| 最大駆動周波数(kHz) | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 |
| 最大速度(mm/min) | 1.5以上 | 1.5以上 | 1.5以上 | 1.5以上 | 1.5以上 | 1.5以上 | 1.5以上 | 1.5以上 | 1.5以上 | 1.5以上 | 1.5以上 | 1.5以上 | 1.5以上 | 1.5以上 |
| 粗動移動量(mm) | 13以上(最大18) | 13以上(最大18) | 5以上(最大7) | 6以上(最大8) | 13以上(最大18) | 13以上(最大18) | 5以上(最大7) | 6以上(最大8) | 6.5以上(最大9) | 6.5以上(最大9) | 4以上(最大6) | 6.5以上(最大9) | 6.5以上(最大9) | 4以上(最大6) |
| 取り付け部(mm) | M9x0.5ネジ | M9x0.5ネジ | M9x0.5ネジ | φ9.5シャンク | M9x0.5ネジ | M9x0.5ネジ | M9x0.5ネジ | φ9.5シャンク | φ6シャンク | φ6シャンク | φ5シャンク | φ6シャンク | φ6シャンク | φ5シャンク |
| 寸法(mm) | 61x32x15.1 | 63x32x15.1 | 52.5x32x15.1 | 47.5x32x15.1 | 61x32x15.1 | 63x32x15.1 | 52.5x32x15.1 | 47.5x32x15.1 | 41x21.6x8.2 | 43x21.6x8.2 | 37.2x21.6x7.2 | 41x21.6x8.2 | 43x21.6x8.2 | 37.2x21.6x7.2 |
| 動作温度 | 10~40℃ | 10~40℃ | 10~40℃ | 10~40℃ | 10~40℃ | 10~40℃ | 10~40℃ | 10~40℃ | 10~40℃ | 10~40℃ | 10~40℃ | 10~40℃ | 10~40℃ | 10~40℃ |
| 保存温度 | 5~40℃ | 5~40℃ | 5~40℃ | 5~40℃ | 5~40℃ | 5~40℃ | 5~40℃ | 5~40℃ | 5~40℃ | 5~40℃ | 5~40℃ | 5~40℃ | 5~40℃ | 5~40℃ |
| 周囲湿度 | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) | 10~80%RH(結露なきこと) |
| コネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ | SMBコネクタ |
| 寿命 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 | 1x109パルス以上 |
| 質量(kg) | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.02 | 0.02 | 0.02 | 0.02 | 0.02 | 0.02 |
| 価格(円) | 77,000 | 77,000 | 77,000 | 77,000 | 77,000 | 77,000 | 77,000 | 77,000 | 88,000 | 88,000 | 88,000 | 88,000 | 88,000 | 88,000 |
| User manual | Download | Download | Download | Download | Download | Download | Download | Download | Download | Download | Download | Download | Download | Download |
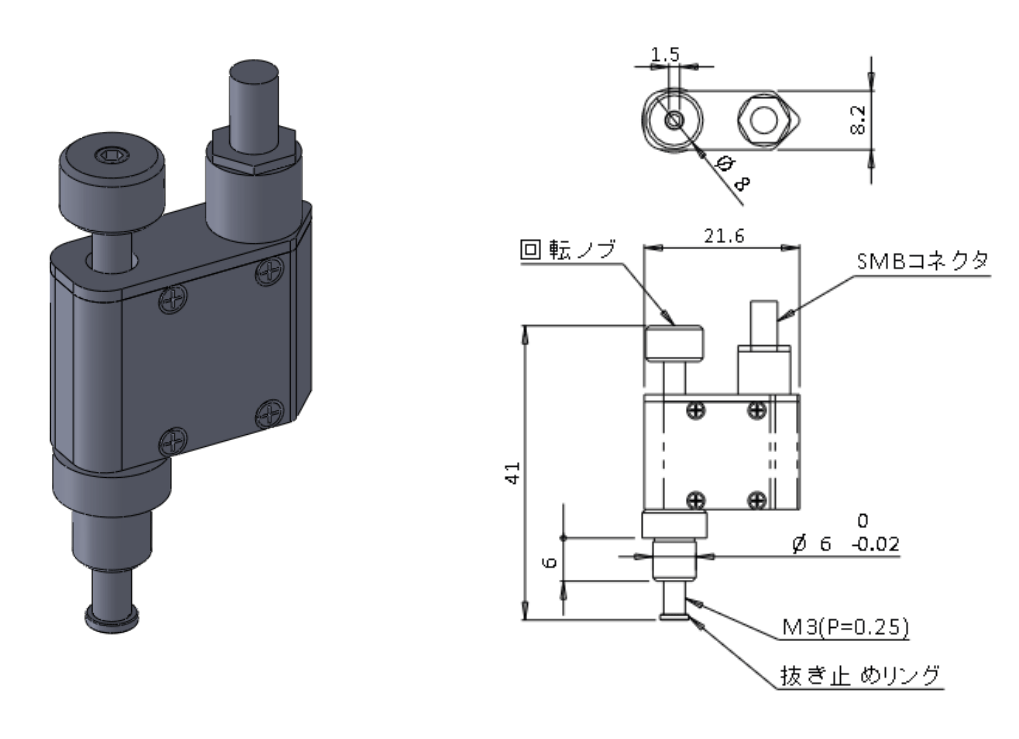
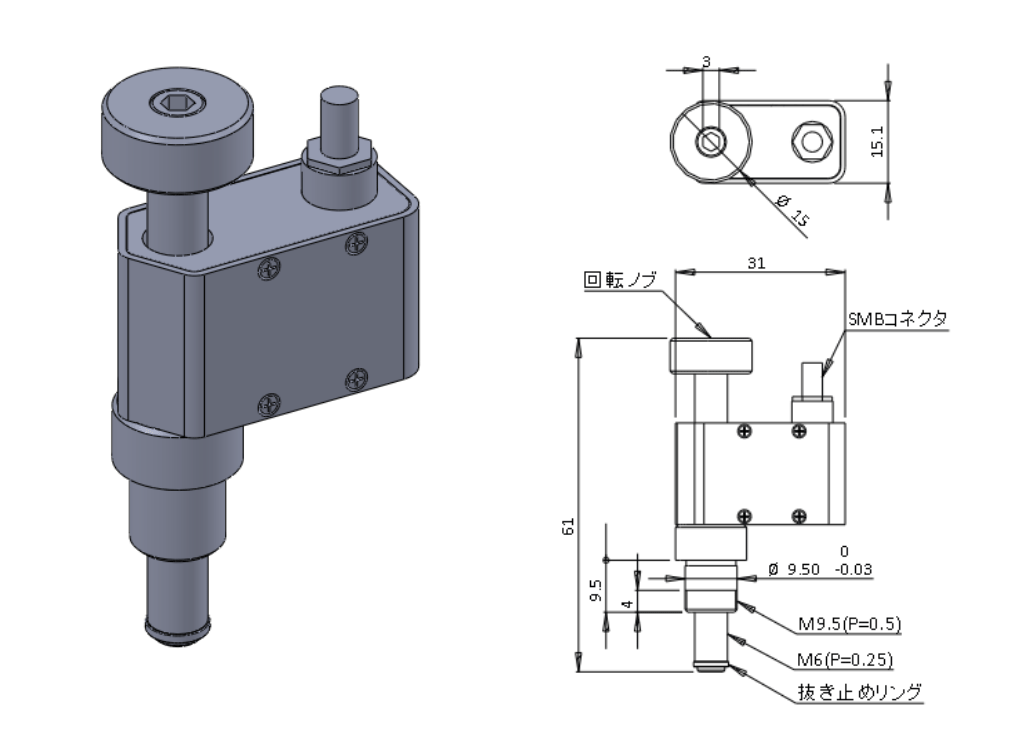
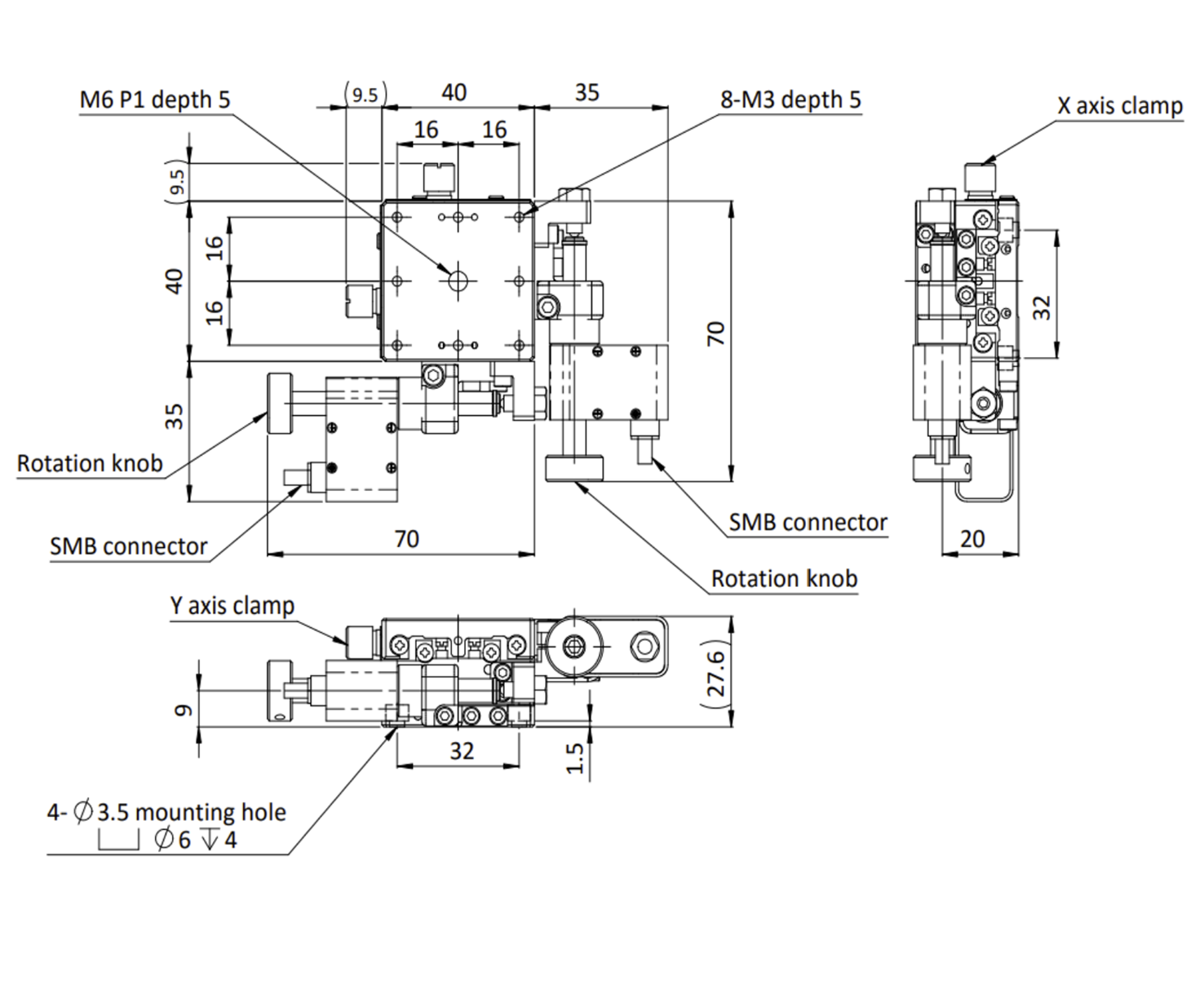
外形図(単位:mm)
PAM3-6.5

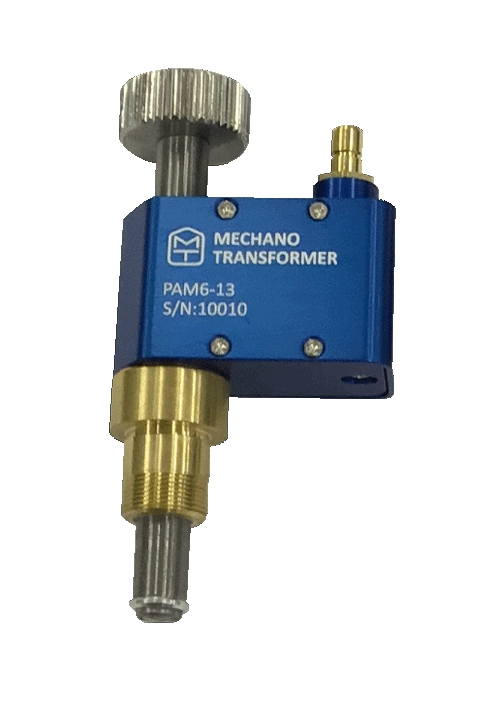
PAM6-13
専用ケーブル(2m)

MTPAM-TSD-402SRA
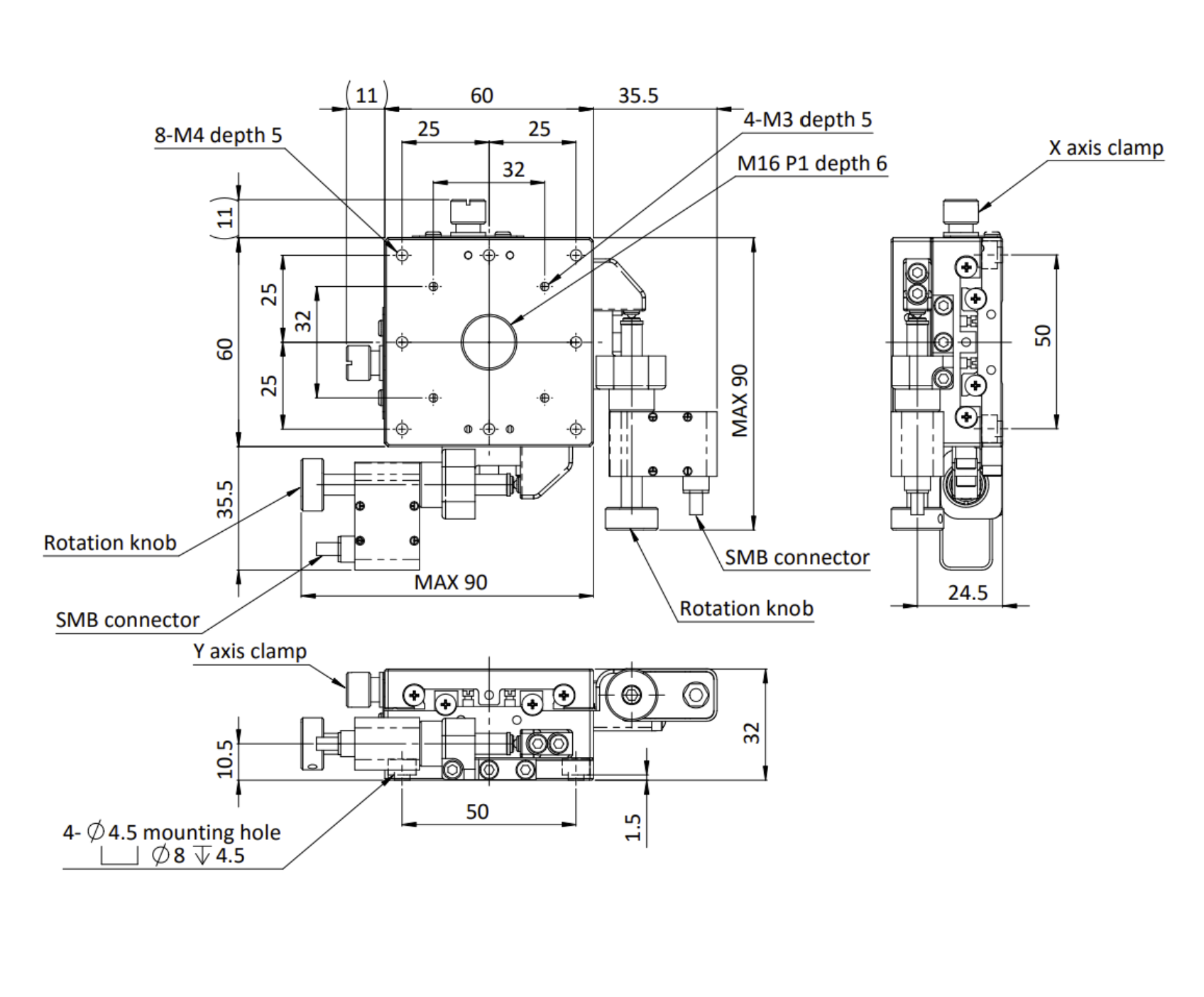
The Nano Alignment Stage Series is designed to construct an optical experimental system more quickly and easily. The MTPAM-TSD-402SR is an electrical driven XY axis stage which is ideal for positioning a load of 20kgf with resolution below 30nm. The optical experimental systems mentioned are mainly based on Michelson interferometer.
| Stage Size | 40×40mm |
|---|---|
| Piezo resolution | < 20nm |
| Moment Stiffness / Pitch | 0.5″/N・cm |
| Moment Stiffness / Yaw | 0.46″/N・cm |
| Moment Stiffness / Roll | 0.5″/N・cm |
| Guide Method | Extended Contact Ball Bearing Guide |
| Travel Accuracy / Pitch | 25" |
| Travel Accuracy / Yaw | 15" |
| Travel Accuracy / Straightness | 0.5μm |
| Running Parallelism | 12μm |
| Travel | ±6.5mm |
| Lead of Actuator | 0.25mm |
| Max. Moment Capacity / Pitch | 7.8N・m |
| Max. Moment Capacity / Yaw | 5.0N・m |
| Max. Moment Capacity / Roll | 7.8N・m |
| Weight | 0.41Kg |
| Primary material | Steel |
| Finish | Super black chrome/Blue Anodized |
| Parallelism | 30μm |
| Orthogonality | 10μm |
The Nano Alignment Stage Series is driven by Piezo Assist MotorⓇ. With Piezo Assist MotorⓇ, the nanometer order alignment can be easily realized. The stage can be electrically controlled or manually adjust. The backlash is smaller than the widely used manual stage.
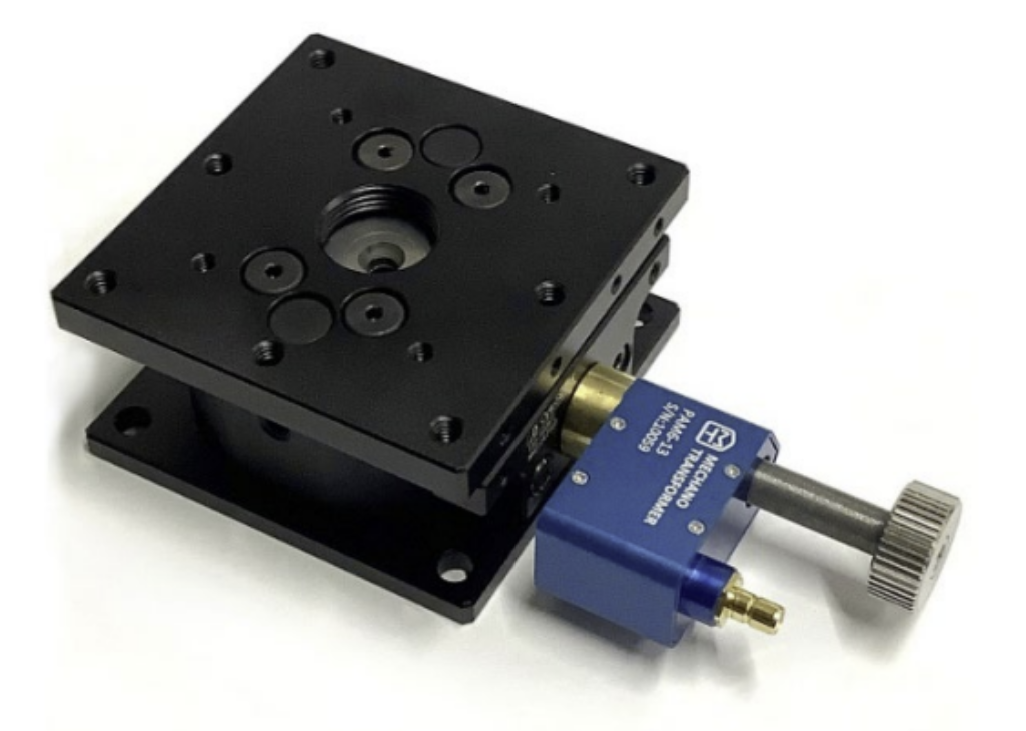
MTPAM-TSD-602SR
The Nano Alignment Stage Series is designed to construct an optical experimental system more quickly and easily. The MTPAM-TSD-602SR is an electrical driven XY axis stage which is ideal for positioning a load of 35kgf with resolution below 30nm. The optical experimental systems mentioned are mainly based on Michelson interferometer.
| Stage Size | 60×60mm |
|---|---|
| Piezo resolution | < 20nm |
| Moment Stiffness / Pitch | 0.31″/N・cm |
| Moment Stiffness / Yaw | 0.16″/N・cm |
| Moment Stiffness / Roll | 0.13″/N・cm |
| Guide Method | Extended Contact Ball Bearing Guide |
| Travel Accuracy / Pitch | 25" |
| Travel Accuracy / Yaw | 15" |
| Travel Accuracy / Straightness | 0.5μm |
| Running Parallelism | 12μm |
| Travel | ±6.5mm |
| Lead of Actuator | 0.25mm |
| Max. Moment Capacity / Pitch | 13.2N・m |
| Max. Moment Capacity / Yaw | 10N・m |
| Max. Moment Capacity / Roll | 13.2N・m |
| Weight | 0.91Kg |
| Primary material | Steel |
| Finish | Super black chrome/Blue Anodized |
| Parallelism | 30μm |
| Orthogonality | 10μm |
The Nano Alignment Stage Series is driven by Piezo Assist MotorⓇ. With Piezo Assist MotorⓇ, the nanometer order alignment can be easily realized. The stage can be electrically controlled or manually adjust. The backlash is smaller than the widely used manual stage.
MTPAM-TSD-603
The Nano Alignment Stage Series is designed to construct an optical experimental system more quickly and easily. The MTPAM-TSD-603 is an electrical driven Z axis stage which is ideal for positioning a load of 15kgf with resolution below 30nm. The optical experimental systems mentioned are mainly based on Michelson interferometer.
| Stage Size | 60×60mm |
|---|---|
| Piezo resolution | 20nm |
| Moment Stiffness / Pitch | 0.41″/N・cm |
| Moment Stiffness / Yaw | - |
| Moment Stiffness / Roll | 0.41″/N・cm |
| Guide Method | Extended Contact Ball Bearing Guide |
| Travel Accuracy / Pitch | - |
| Travel Accuracy / Yaw | - |
| Travel Accuracy / Straightness | 2.5μm |
| Running Parallelism | 20μm |
| Travel | ±5mm |
| Lead of Actuator | 0.25mm |
| Max. Moment Capacity / Pitch | 6.9N・m |
| Max. Moment Capacity / Yaw | - |
| Max. Moment Capacity / Roll | 6.9N・m |
| Weight | 0.81Kg |
| Primary material | Steel |
| Finish | Black Matte/Blue Anodized |
| Parallelism | 80μm |
The Nano Alignment Stage Series is driven by Piezo Assist MotorⓇ. With Piezo Assist MotorⓇ, the nanometer order alignment can be easily realized. The stage can be electrically controlled or manually adjust. The backlash is smaller than the widely used manual stage.
MTPAM-LMHB-30M
The Nano Alignment Mirror mounter Series is designed to construct an optical experimental system more quickly and easily. The MTPAM-LMHB-30M is a 2-axis electrical driven mirror mounter, which is ideal for constructing optical cavity and other optical experiment setup. The MTPAM-LMHB-30M can easily correct the misalignment of even less than 1.0mRad. These misalignments often occur in the optical experimental systems like gravitational wave detectors based on Michelson interferometer.

Save you from a lot of effort spent on alignment.
| Type | Kinematic |
|---|---|
| Adjustment Range /Tilt | ±2.8° |
| Adjustment Range /Rotation | ±2.8° |
| Resolution /Tilt | 0.7µrad/rotation |
| Resolution /Rotation | 0.7µrad/rotation |
| Weight | 0.4Kg |
| Primary material | Aluminum |
| Coarse Resolution /Tilt | - |
| Coarse Resolution /Rotation | - |
| Compatible Optics Diameter | φ30mm |
| Compatible Optics Thickness | 3 - 9mm |
| Fine Adjuster Indicator Conversion /Tilt | - |
| Fine Adjuster Indicator Conversion /Rotation | - |
| Fine Adjustment Range /Tilt | - |
| Fine Adjustment Range /Rotation | - |
| Finish | Black Anodized/Blue Anodized |
Automate your alignment with artificial intelligence like neural network or other algorithms.
The Nano Alignment Mirror mounter Series is driven by Piezo Assist MotorⓇ. With Piezo Assist MotorⓇ, the μ-1Rad order alignment can be easily realized. The mirror mounter can be electrically controlled. The backlash is smaller than the widely used manual mirror mounter.
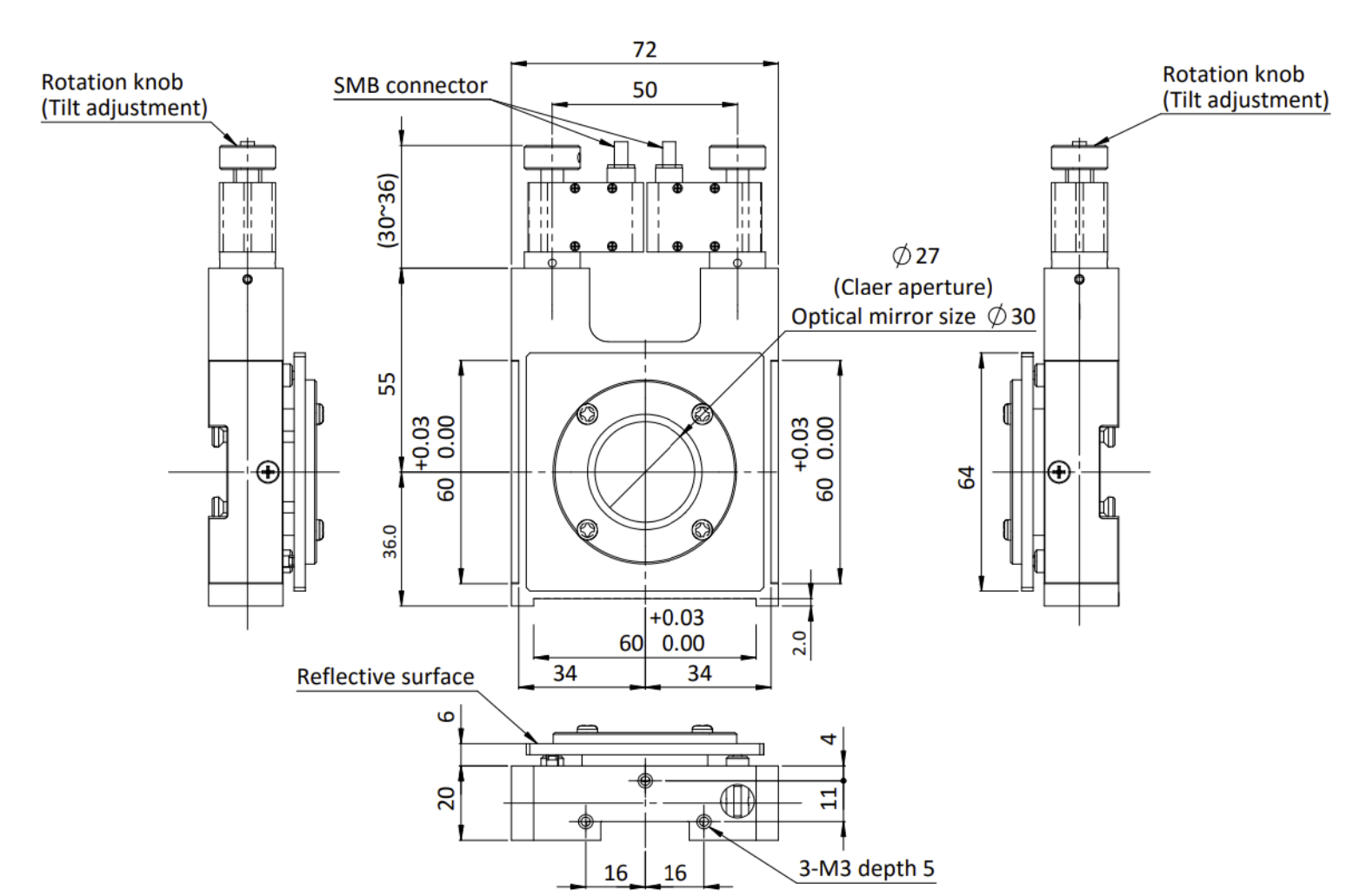
MTPAM-MHG-MP30-NL
The Nano Alignment Mirror mounter Series is designed to construct an optical experimental system more quickly and easily. The MTPAM-MHG-MP30-NL is a 2-axis electrical driven mirror mounter, which is ideal for constructing optical cavity and other optical experiment setup. The MTPAM-MHG-MP30-NL can easily correct the misalignment of even less than 1.0mRad. These misalignments often occur in the optical experimental systems like gravitational wave detectors based on Michelson interferometer
With the MTPAM-MHG-MP30-NL, you can build a self-alignment system for your optical setup to save you from a lot of effort spent on alignment. The alignment procedures can be easily automated with a program. The automation algorithm can be based on the artificial intelligence (like neural network) or others. To detect the misalignment, Wave Front Sensor (WFS) method is one of the conventional methods. By detecting the interference between the 00 and10 modes of the Hermite Gaussian mode, WFS method can controls the attitude of the mirror.

Save you from a lot of effort spent on alignment.
| Primary material | Aluminum |
|---|---|
| Adjustment Range /Tilt | ±3° |
| Adjustment Range /Rotation | ±3° |
| Resolution /Tilt | 0.7µrad/rotation |
| Resolution /Rotation | 0.7µrad/rotation |
| Weight | 0.17Kg |
| Number of Adjustment Axes | 2 points |
| Compatible Optics Diameter | φ30mm |
| Compatible Optics Thickness | 3 - 5mm |
| Finish | Black Anodized/Blue Anodized |
The Nano Alignment Mirror mounter Series is driven by Piezo Assist MotorⓇ. With Piezo Assist MotorⓇ, the μ-1Rad order alignment can be easily realized. The mirror mounter can be electrically controlled. The backlash is smaller than the widely used manual mirror mounter.
Automate your alignment with artificial intelligence like neural network or other algorithms.
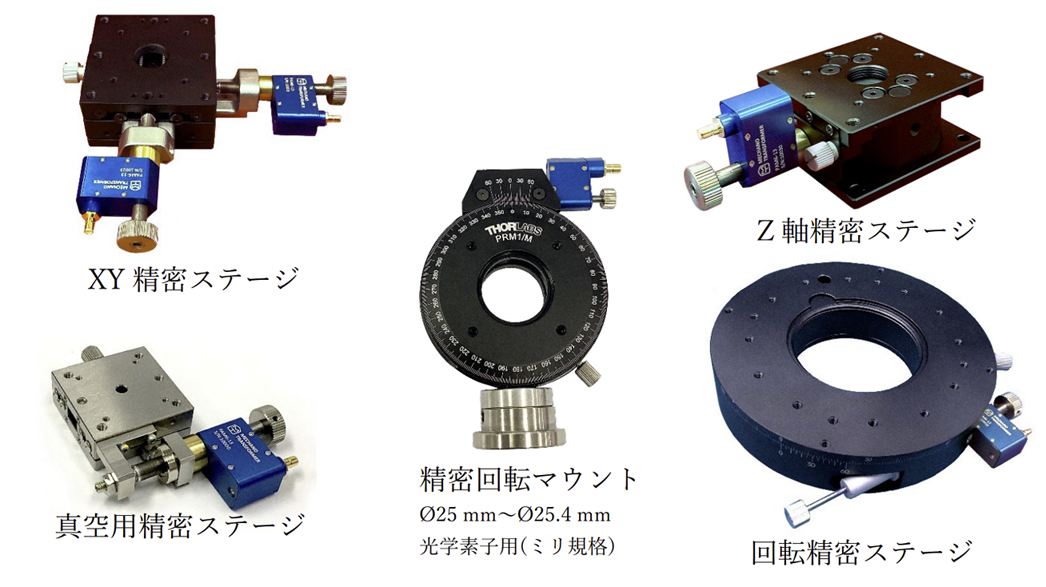
用途
(PAM6-13の応用例)ステージ(40x40□、60x60□)に取り付ける。
ピエゾアシストモータの動作事例
図1、図2は、この装置を用いて、駆動周波数1Hz及び5Hzで40パルス駆動したときの
変位vs時間特性です。図1は正回転、図2は逆回転の
場合です。
ピエゾアシストモータの応用例(ミラーホルダー角度調整)

駆動実験動画(参考)
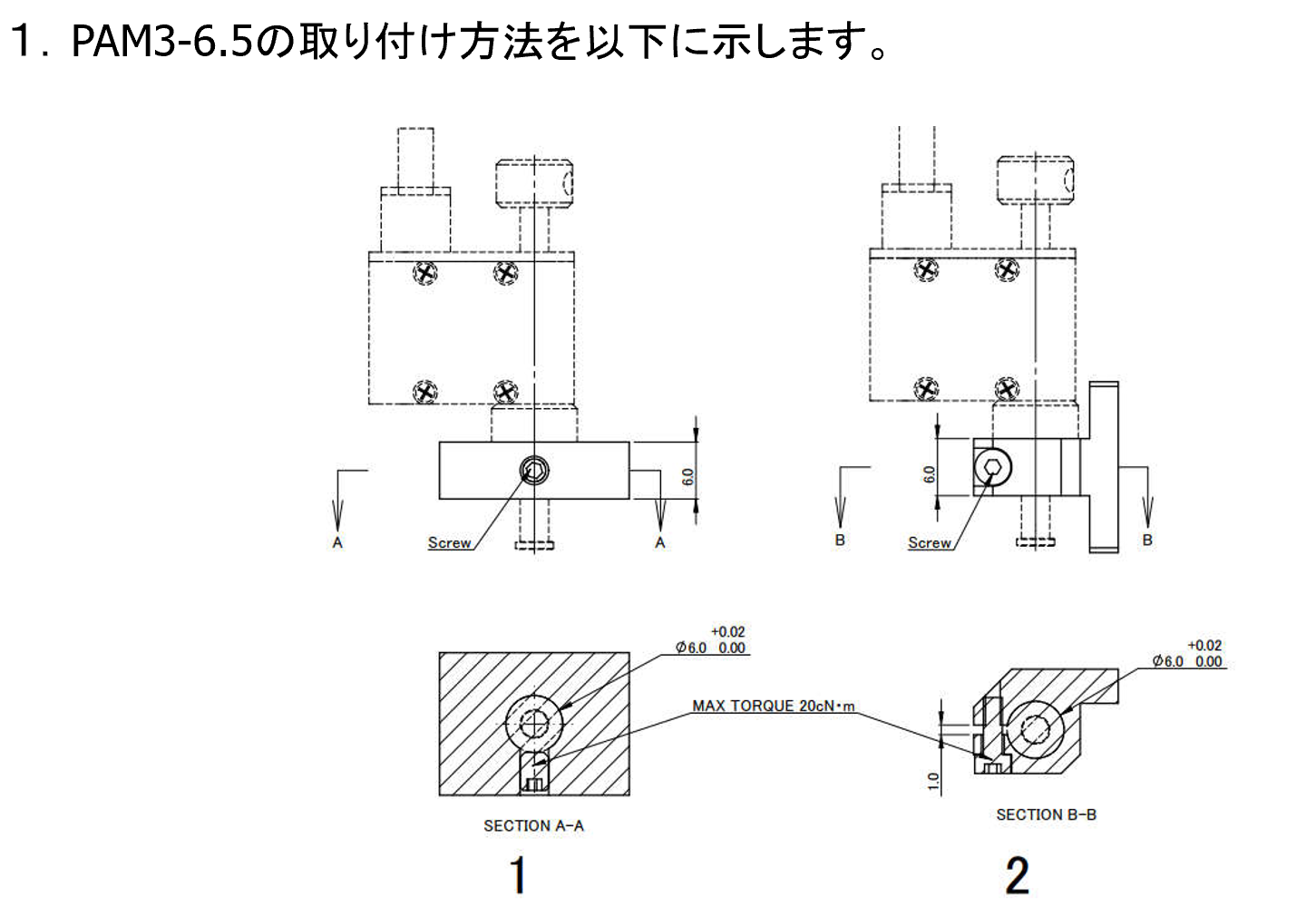
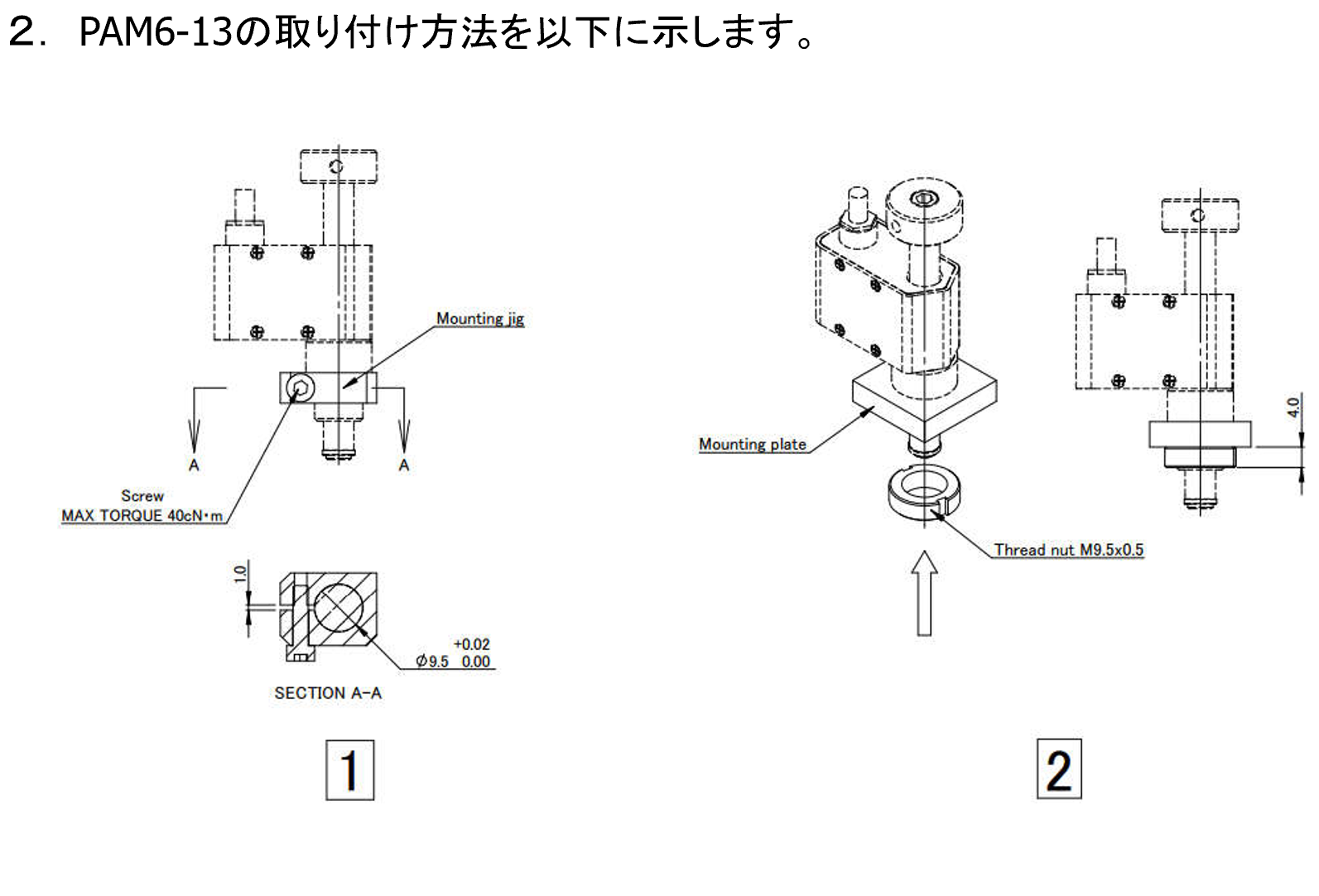
取付及び注意事項
4. 取り扱い上の注意
コントローラ及びその接続方法
1. PAM3-6.5 or PAM6-13
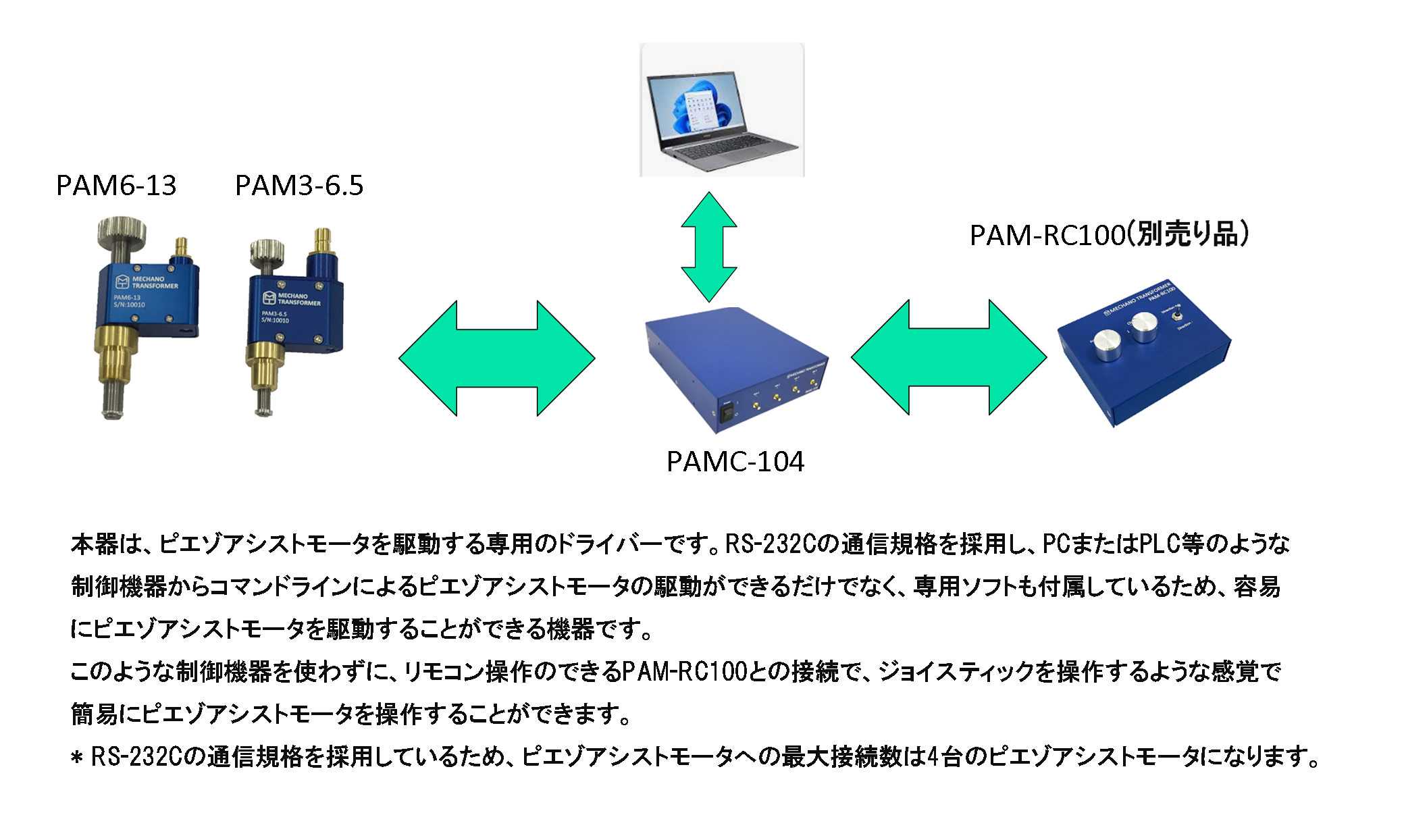
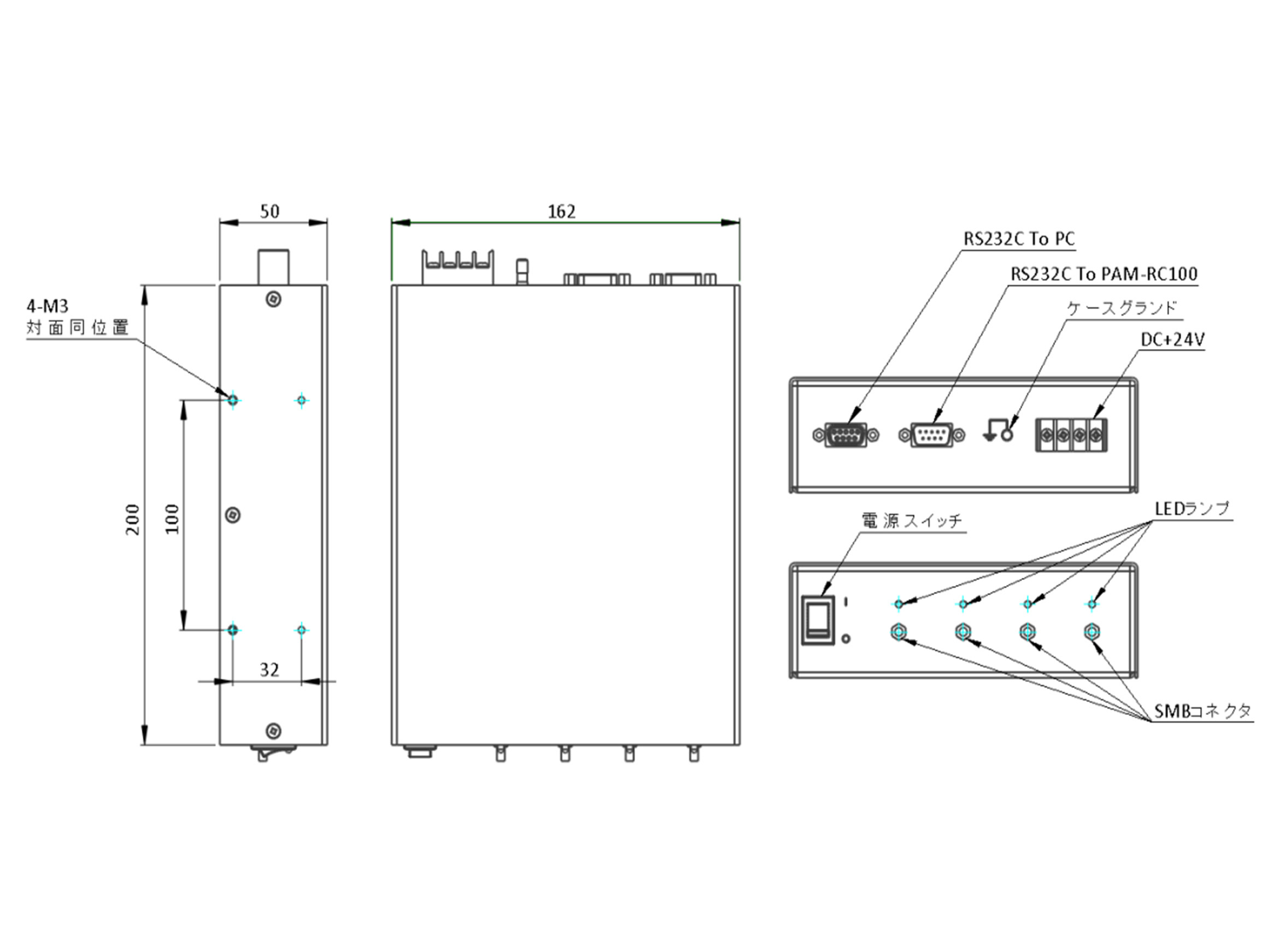
2. PAMC-104
| 品名 | PAMC-104 |
|---|---|
| 制御軸数 | 4 |
| 最大駆動周波数(Hz) | 1500 |
| インターフェイス | RS232C |
| 電源電圧(V) | DC24 |
| 消費電流(A) | ― |
| 寸法(mm) (突起部除く) |
200x162x50 |
| 動作温度 | 0~40℃ |
| 保存温度 | 0~40℃ |
| 周囲湿度 | 10~80%RH(結露なきこと) |
| 質量(kg) | 1.2 |
| 価格(円) | 132,000 |
| User manual | Download |
PAMC-104

製品構成
| PAMC-104 | 型番 | 数量 |
|---|---|---|
| 本体 | PAMC-104 | 1 |
| ソフトインストールCD | PAM-SOFT-231213-001 | 1 |
| 取扱説明書 | PAM-DOC-MAN-231213-001 | 1 |
| 付属通信ケーブル | PAM-CA-USB-DSUB9-1 | 1 |
製品構成
| 型番 | 数量 | |
|---|---|---|
| (別売り) 電源アダプター | UNI345-2419-PL03B | 1 |
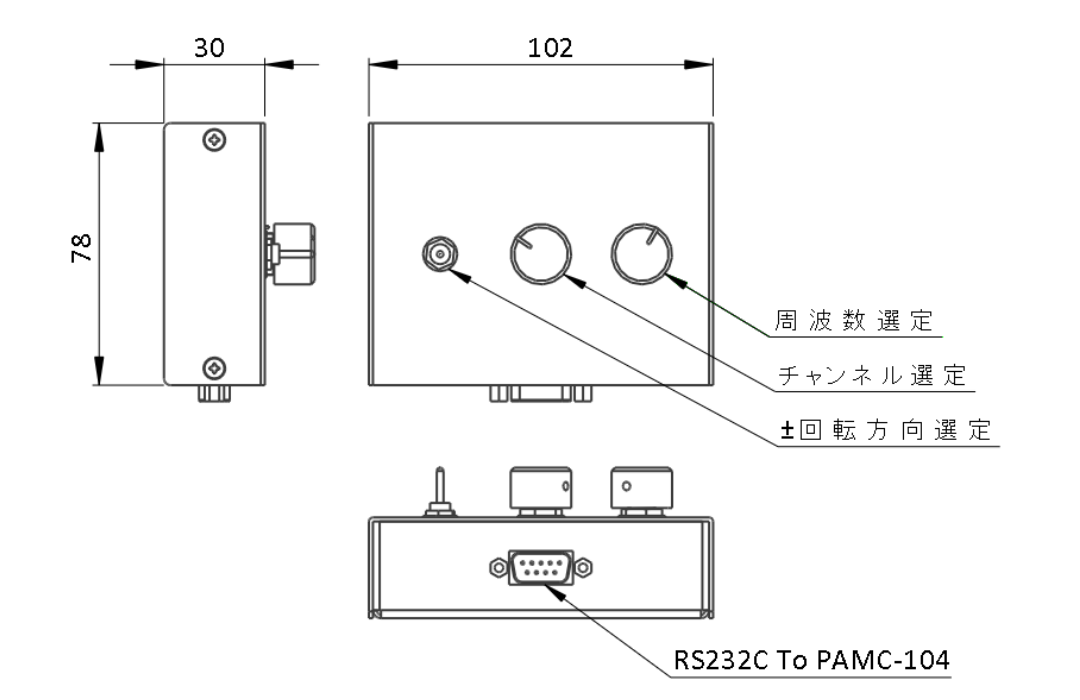
4. PAM-RC100
| 品名 | PAM-RC100 |
|---|---|
| 最大駆動周波数(Hz) | 1500 |
| チャンネル切替数 | 4 |
| インターフェイス | RS232C |
| 寸法(mm) (突起部除く) |
102x78x30 |
| 動作温度 | 0~40℃ |
| 保存温度 | 0~40℃ |
| 周囲湿度 | 10~80%RH(結露なきこと) |
| 質量(kg) | 0.32 |
| 価格(円) | 55,000 |
| User manual | Download |
PAM-RC100(別売り品)

製品構成
| PAM-RC100 | 型番 | 数量 |
|---|---|---|
| 本体 | PAM-RC100 | 1 |
| 付属通信ケーブル | PAM-CA-DSUB9-DSUB9-2 | 1 |
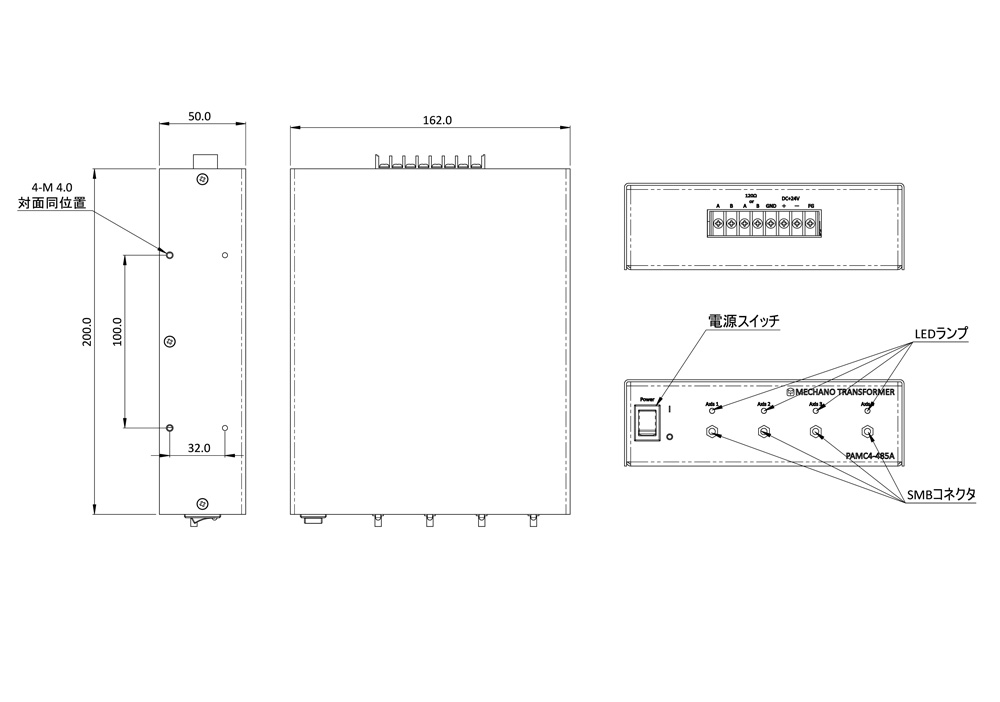
3. PAMC4-485
| 品名 | PAMC4-485 |
|---|---|
| 最大駆動周波数(Hz) | 1500 |
| 制御軸数 | 4 |
| チャンネル切替数 | 4 |
| インターフェイス | RS485 |
| 電源電圧(V) | DC24 |
| 消費電流(A) | ― |
| 寸法(mm) (突起部除く) |
200x162x50 |
| 動作温度 | 0~40℃ |
| 保存温度 | 0~40℃ |
| 周囲湿度 | 10~80%RH(結露なきこと) |
| 質量(kg) | 1.2 |
| 価格(円) | 132,000 |
| User manual | Download |
PAMC4-485

スマートアクチュエータシリーズピエゾアシストモータⓇ
精密ステージでナノメートルの位置決めが可能に
詳細:
マイクロメータヘッドをPiezo Assist MotorⓇに置き換えるだけで、
本製品を活用するメリット⇒御社装置の自動化・技術高度化の実現
Piezo Assist MotorⓇは30ナノメートル以下の分解能を有する小型の電動アクチュエータです。精密ステージのマイクロメータヘッドをPiezo Assist MotorⓇに置き換えるだけで、超精密な位置決めを自動化できます。
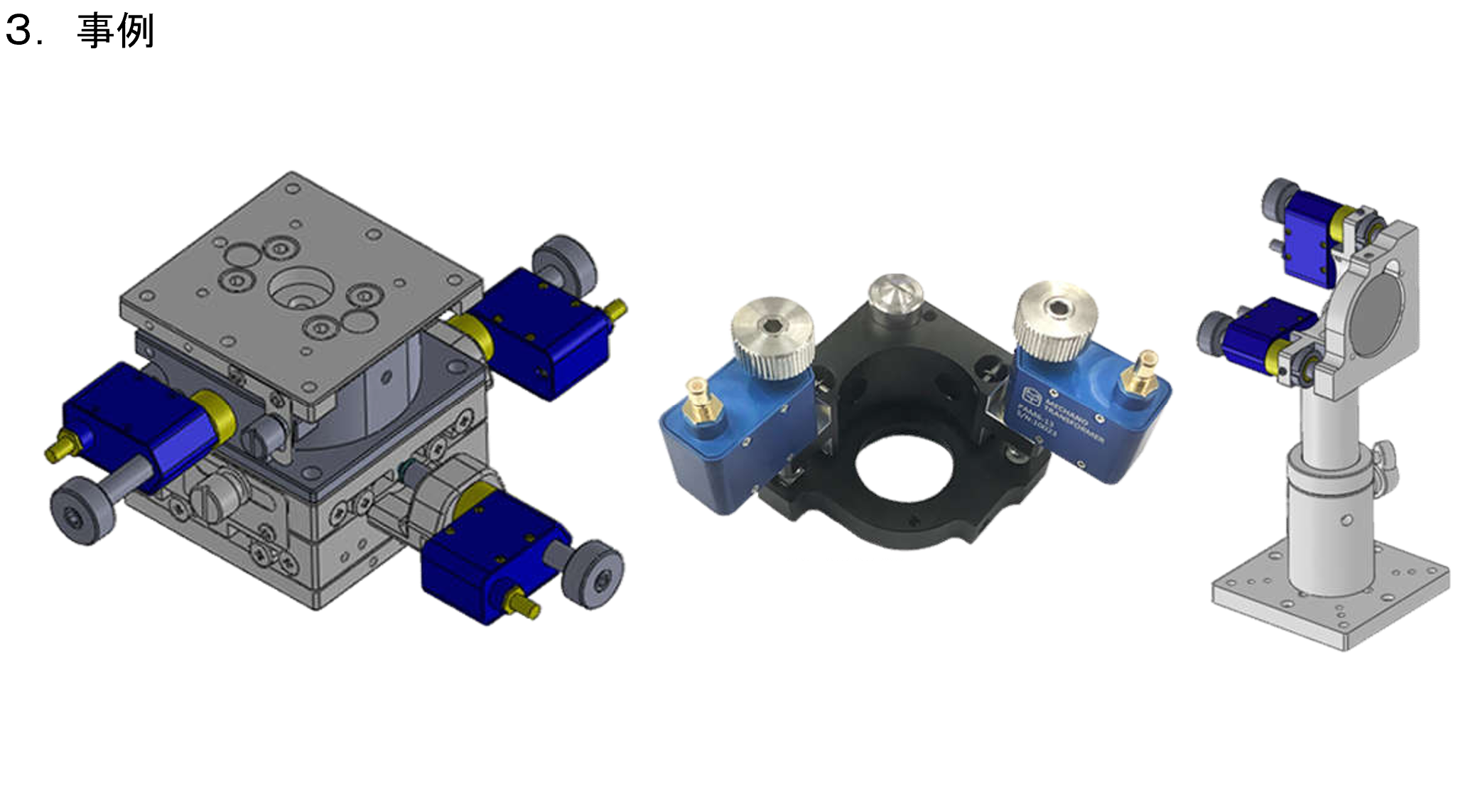
使用事例
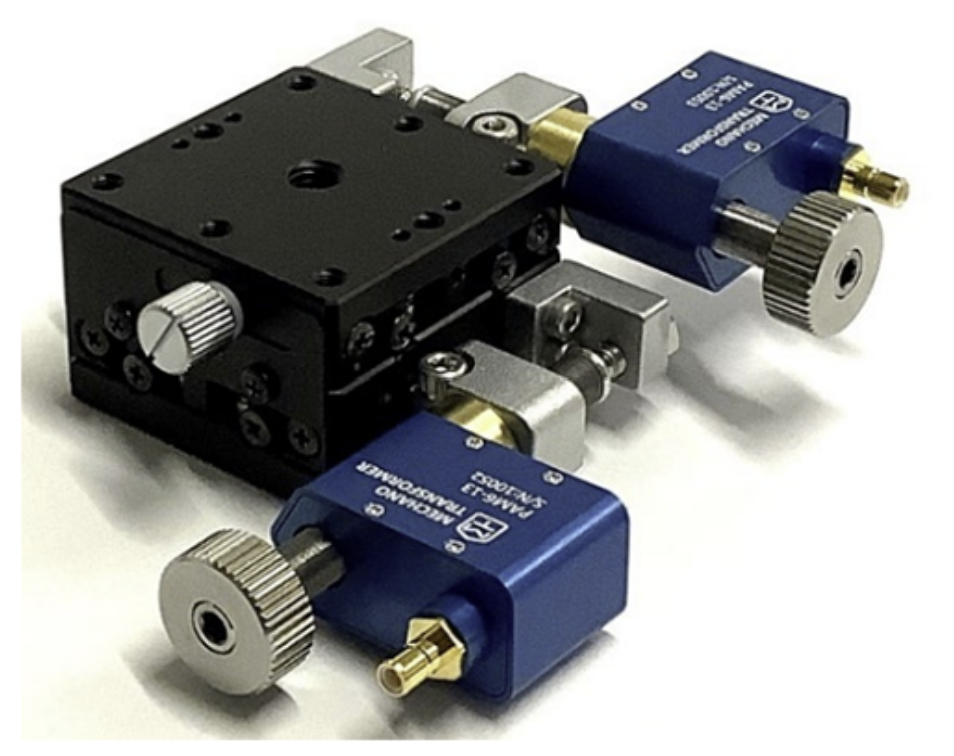
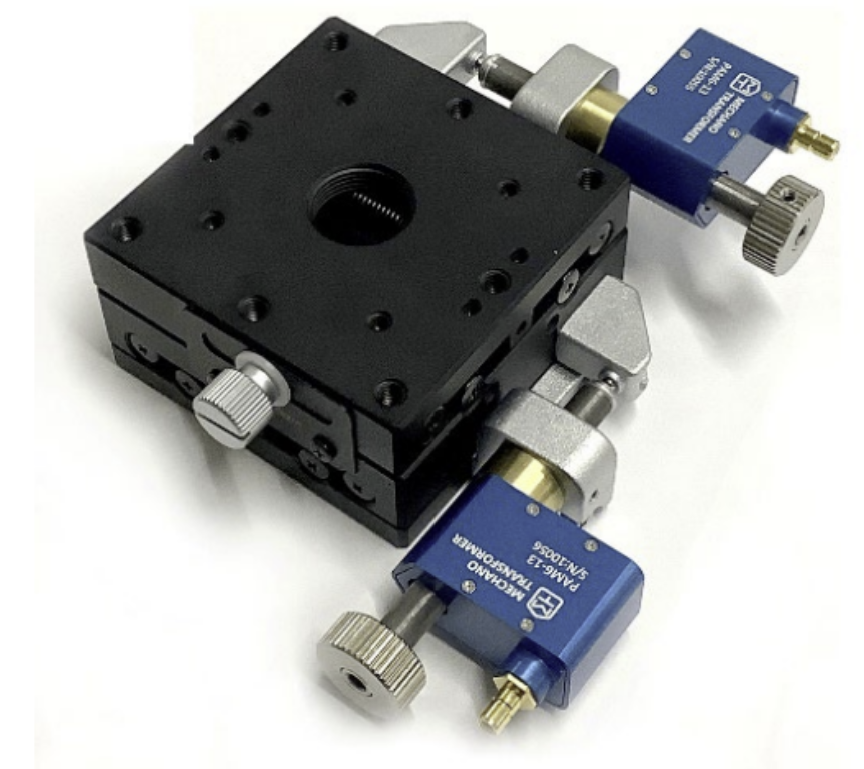
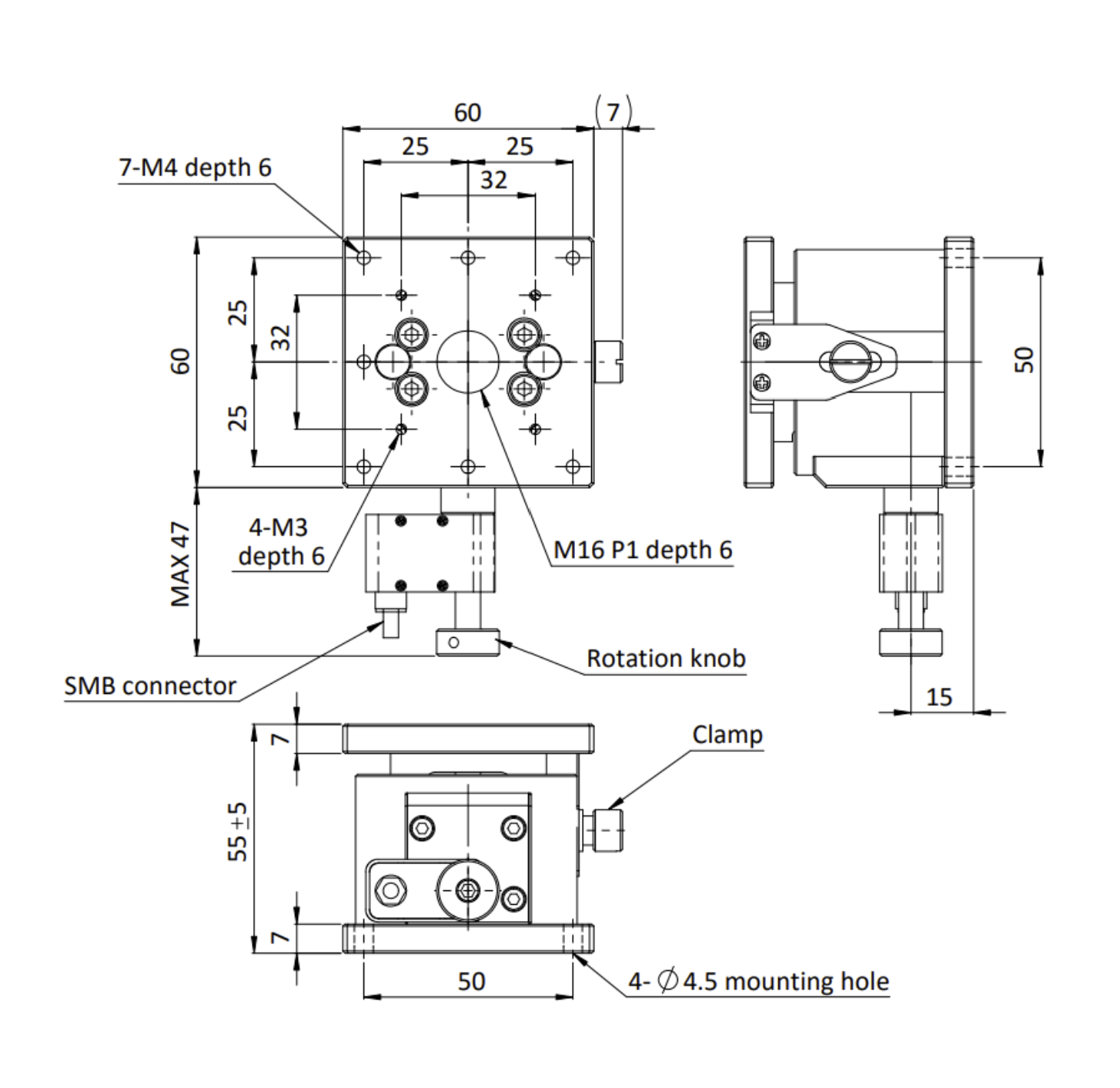
1. 精密ステージ
ピエゾアシストモータⓇを搭載した3軸精密ステージ
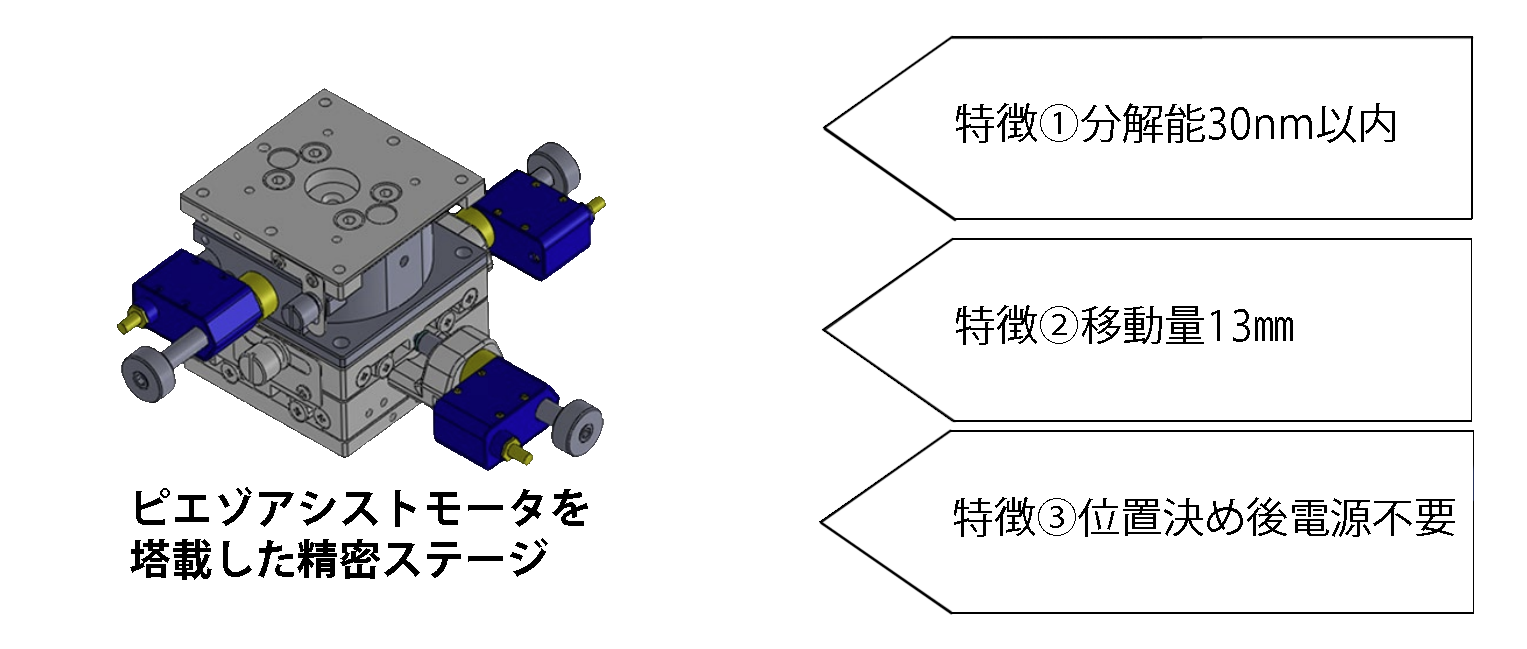
応用事例:マイクロマニピュレーション、顕微鏡のスキャニング、 高分解能顕微鏡
2.ミラーマウント
ピエゾアシストモータⓇを搭載した2軸ミラーマウント
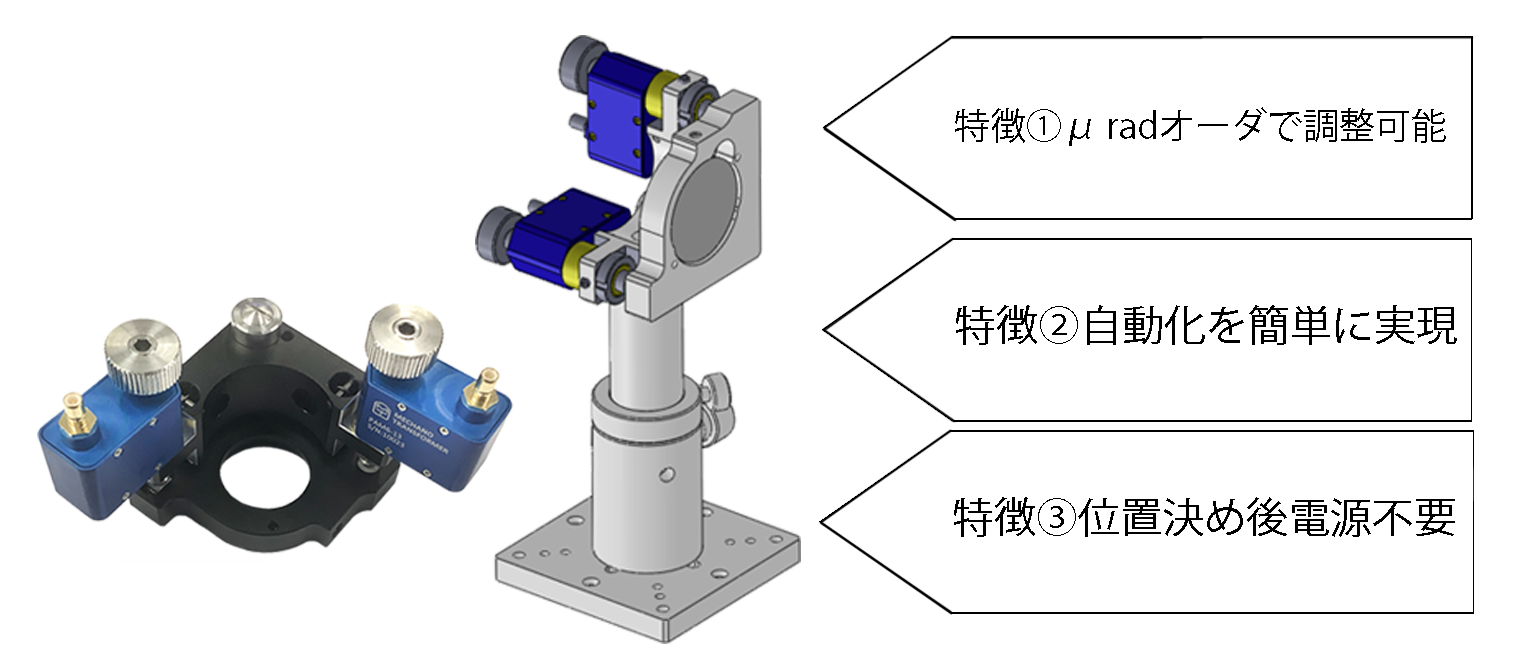
応用事例:干渉計の構築、レーザ照射位置決め、レーザ溶接
事例写真
取り扱い注意:
1. ピエゾアシストモータⓇは、動作中に高電圧を印加されます。モータの駆動にはPAMC-104やPAMC4-485などの指定されたコントローラのみを使用してください。
2. ピエゾアシストモータⓇまたはコントローラからケーブルを抜くか、差し込む必要がある場合は、コントローラの電源を切ってから行ってください。
3. ピエゾアシストモータⓇやコントローラのPAMC-104やPAMC4-485等を分解したり改造したりしないでください。
4. 可燃性物質や湿気や湿度の高い場所の近くでモータを使用しないでください。
5. 異臭、異音、過熱、放熱が検出された場合は、コントローラの電源を切り、状況をご確認ください。
6. コントローラを落としたり、衝撃を与えたりした後は、ドライバーの電源を入れないでください。
7. 動作中は高電圧が印加されるため、動作中はPAMに触れないでください。
8. ピエゾアシストモータⓇがネジ端まで移動した場合は、手動で調整ノブを回し、位置調整をすることができます。
9. ピエゾアシストモータⓇはオープンループデバイスです。絶対位置が必要な場合は、別途に外部センサーを設け、閉ループを設定する必要があります。
10. 動作中、ピエゾアシストモータⓇは高いピッチノイズを出します。
11. ノブを一方の端からもう一方の端に動かして、グリースを時々再分配することで、グリースの固着を防止できます。モータを長時間使用しないと、グリースが硬くなることがあります。その場合は、ノブを手動で一方の端からもう一方の端に回すことで、直ることがあります。